Sweep |
  
|
Sweep |
|
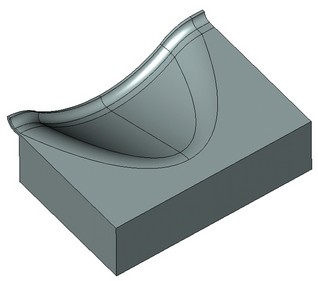
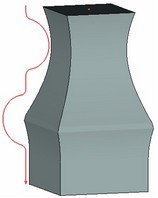
Sweep operation allows creating a solid body by sweeping a contour along a spatial path. This operation belongs to the family of so-called "kinematic" operations, as it results in creating a body swept by the original contour as the latter is moved along a guiding path. Depending on the type of original contour geometry (the contour can have wire or sheet body geometry), the operation will yield a sheet or solid body. As the contour is being swept along the path, its orientation, twisting and scaling can be controlled.
Operation main capabilities
Contour
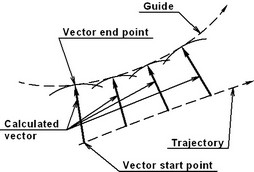
Any object with wire or sheet body geometry can be used as the original contour. A multi-contour 3D profile can be used as well. Sweeping a contour means placing its multiple instances along the selected path. A contour instance will be referred to as an intermediate section. To define an intermediate section, the system calculates orientation of the coordinate system of that intermediate section. The original coordinate system is calculated as the reference for the original contour orientation. A contour instance creation is done by transforming the original contour to the calculated coordinate system of a given intermediate section.
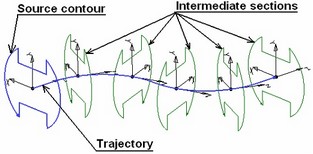

The original coordinate system is calculated at the start of the path. Two of its axes are set perpendicular to the path, and one is tangent to the path at the start point. The original contour position is fixed with respect to the original coordinate system. The contour sweeping is done by placing the original coordinate system together with the contour in other points of the path, in which the coordinate systems are defined for the intermediate sections.
Control over contour orientation
Different geometry can be created, depending on the position of the intermediate sections with respect to the path. One of the three types of the contour orientation can be specified when creating the operation:
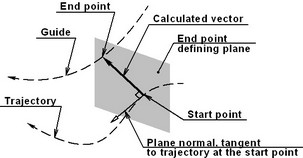
- Perpendicular to the trajectory. The X-Y plane of the intermediate section coordinate system is always oriented perpendicular to the trajectory. The tangency vector at the point of the section creation defines the Z-axis of the local coordinate system.
This mode is primarily for flat contours. When defining the operation, the plane of a flat contour is always oriented perpendicular to the guiding path in each intermediate point. When using non-flat contours, the system automatically calculates some "mean normal" that is used for orienting the contour.
In case of non-planar contour the system automatically calculates some “mean normal” that is used for orienting the contour. We recommend using additional correction of the original contour position (see section “Correction of Contour Original Position”) in order to get a predictable result.
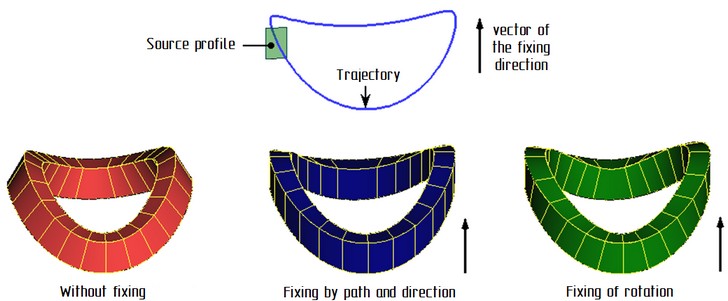
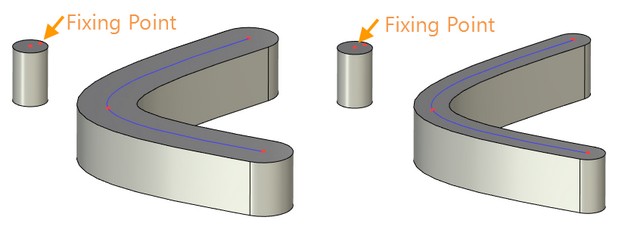
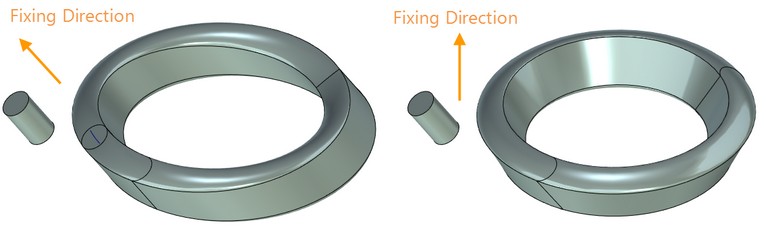
When using non-planar trajectory, condition of perpendicularity is not sufficient for obtaining a desired result due to twist of the profile around the trajectory. In these cases it is possible to additionally define fixing direction. Specifying fixing direction can change the method of constructing coordinate systems of intermediate sections. The variant of a change depends on the selected method of interpretation of the fixing direction: fixing by path and direction, fixing of rotation.
Vector fixing the direction should not coincide with the tangent to the trajectory at any point of the trajectory.
Fixing by path and direction: tangent to the trajectory at each point of the trajectory is projected onto the plane perpendicular to the fixing direction. The coordinate system of the intermediate section is constructed from obtained projection of the tangent to the trajectory and fixing direction.
Fixing of rotation: the coordinate system of the intermediate section is constructed by the tangent to the trajectory at the given point of the trajectory and by the cross product of the fixing direction vector and the tangent.
- Parallel to the original profile. The coordinate axes of each intermediate section are oriented parallel to the axes of the original coordinate system. Sweeping in this way results in the parallel translation of the original contour.
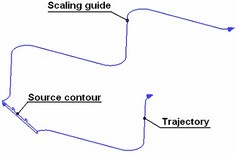
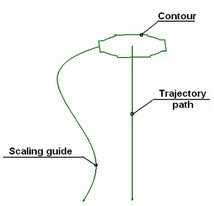
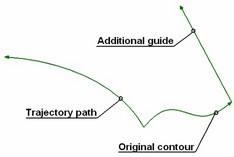
- By guides. The operation is created by sweeping a contour along the trajectory while orienting the contour towards the points on the additional guides. At the same time, one of the guides also defines the contour scaling law. In this way, the guides are required to be smooth (no corners). This is a special way of creating the operation that will be discussed in a separate topic (see below). In some particular cases faces can be used for defining only orientation (direction) of the intermediate sections.
Trajectory and guides
To define this operation, specify the trajectory path and, optionally, one or two guides. The contour is swept along the trajectory path, which must always be defined.
Any object with wire geometry can be used as the trajectory path. Most commonly, the trajectory is defined using a 3D path. However, one can also use 3D profiles, a chain of edges, loops, etc.
Two additional guides are necessary for defining particular twisting and scaling laws for intermediate sections.
Correction of contour original position
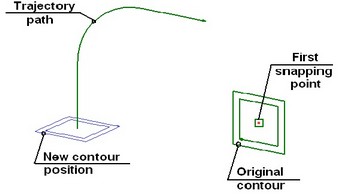
The original contour position can be additionally corrected by selecting one or three additional 3D points.
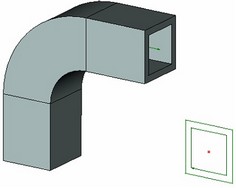
One point defines the contour snapping to the start of the path. Contour orientation in this case depends on the selected orientation method. If the option "Profile is perpendicular to path" is set, the plane of the flat profile is reoriented orthogonal to the path at the start point. When using non-flat contours, the system automatically calculates some "mean normal" that is used for orienting the contour "plane". If the option "Profile is parallel to source profile" is set, the contour is moved to the start point of the trajectory path by parallel translation.
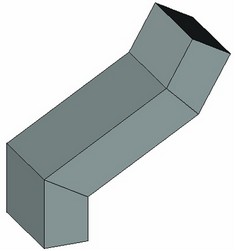
In some cases, one point may not be enough for correcting the original contour position since it does not fix the contour rotation about its normal. One can select two additional points in order to specify additional contour rotation about the normal. The second selected point, together with the first one, will determine the original orientation vector (similar to a 2D fragment fixing vector). The third selected point, together with the start of the trajectory, will define the target orientation vector. The projection of this vector on the "plane of the contour" will determine the angle of additional rotation of the contour. If a non-flat contour is used, the "plane of the contour" is determined by the calculated "mean normal".
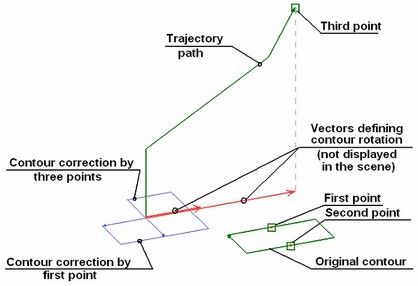
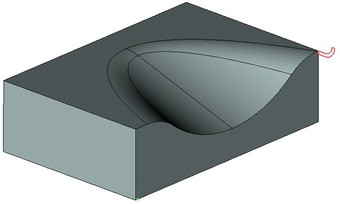
This drawing is located in the library "Examples", the folder "3D Modeling\Sweep\Drawing 3.grb".
When using non-flat contours, even three-point contour positioning does not guarantee the expected result. In such a case, we recommend setting up the desired contour orientation before starting the operation "Sweep". For example, one can create the contour in the desired position from the beginning or, if that is not feasible, use coordinate system-based copying.
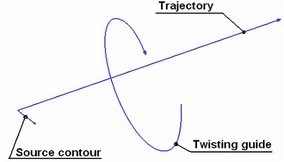
Contour twist
One can define additional contour twist along the sweeping trajectory path. The rotation angle of the intermediate sections can be defined by table or by using additional geometry – a guide path or surface. This approach allows quite different ways of calculating the contour rotation angle.
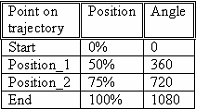
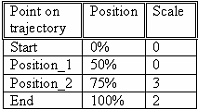
When using a table for defining twist, rotation by the specified angle of each intermediate section is done about the Z-axis of the calculated coordinate system. The table appears as a set of trajectory points, whose position is defined in percent of the trajectory length, with a fixed value of rotation angle entered against each point. When setting up the table of rotation angles, one can use special draggers. This functionality is convenient, for example, for creating sweeps with the surface twisted as a spiral.



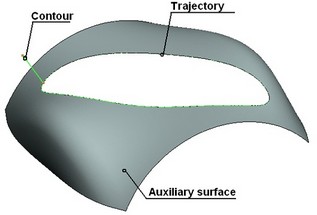
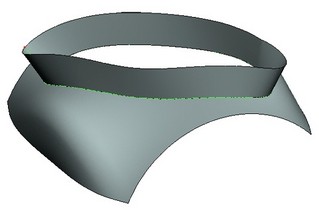
The choice of a path or surface is determined by the specifics of a particular task. For example, if the contour is expected to trace a specified curve throughout sweeping, use a guiding path. Alternatively, if one needs to create an auxiliary surface touching another surface, staying tangential to that other one, then a surface can be selected for the swept contour orientation. In this way, the tangency condition will be maintained between any intermediate section and the surface.
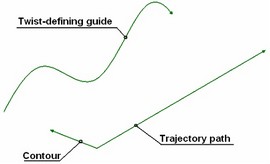
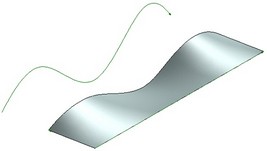
When creating bodies using contour twisting (defined by a guide or surface), make sure of the correct original position of the contour. Thus, in the first example the contour must be originally directed towards the start point of the additional guide. In the second example, the contour shall make tangential transition to the adjacent surface in the original position.
The system uses an additional guide or surface for calculating auxiliary vectors defining a rotation angle for each intermediate section. The rotation angle is calculated as the angle between the directions of the auxiliary vector at the start point of the trajectory and at the current point, for each intermediate section. If the calculated auxiliary vector does not lie in the X-Y plane of the coordinate system of an intermediate section, its projection on that plane will be used.
When a surface is used for calculating the auxiliary vector, its direction is calculated in a general case as follows. A point is identified on the surface that is nearest to the origin of the coordinate system of an intermediate section. The sought direction is a tangency direction constructed at this point. Therefore, best results are achieved when the used surface is closest to the trajectory. In this case, the trajectory can be defined by using, for example, edges of the surface.
If a guide is used for calculating rotation angles of intermediate sections, you can select one of the four methods for calculating the auxiliary vector. The methods for calculating auxiliary vectors by additional guides are described in a separate topic (see below).
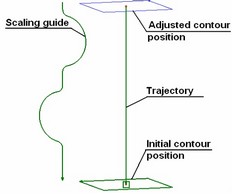
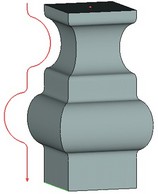
Contour scaling
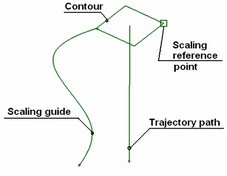
When sweeping the contour, one can define an additional law for scaling the contour with respect to the origin point of a section coordinate system or any other point in the space, related with the section coordinate system and moving together with it. The scale factor can be specified in a table or by using an additional guide.
The table appears as a set of trajectory points, with a fixed value of the scale factor entered against each point. In the rest of the points along the trajectory path, the value of the scale factor is interpolated by the system automatically.


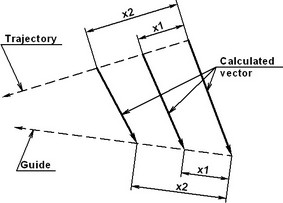
When using an additional scaling guide, the scale factor of an intermediate section is calculated as a ratio of the vector length in the current point of the trajectory to that in the first section. The methods for calculating auxiliary vectors by additional guides are described in a separate topic (see below).

When using a scaling reference point, the way of scaling the contour with respect to that point can be one of the following:
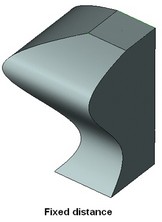
● Scale the distance from the origin on the trajectory to the reference point, keep the contour snapped to the reference point, but don't scale the contour;
● Scale the contour only; don't change the distance between the reference point in the trajectory;
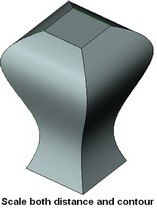
● Scale both the contour and the distance to the reference point.

Sweep creation by guides.
Creating a body by guides requires a contour, a trajectory and at least one additional guide. The first additional guide is used for calculating the first auxiliary vector for each intermediate section. The intermediate points for defining auxiliary vectors on the trajectory and additional guides are always calculated "by parameter". This vector is simultaneously used for scaling an intermediate section and for orienting it (by calculating the direction of one of the axes of the intermediate section coordinate system). The direction of the second axis of the intermediate section coordinate system can be calculated automatically (as the cross product of the calculated auxiliary vector and the tangent to the trajectory at the origin point of the intermediate section coordinate system).
To define an intermediate section orientation other then offered by the system, one could use a second additional guide. That will help the system calculate the second auxiliary vector for each intermediate section. The two auxiliary vectors will define the X-Y plane of the intermediate section coordinate system. The Y-axis of the intermediate section coordinate system will be oriented in the direction closest to that of the second auxiliary vector.
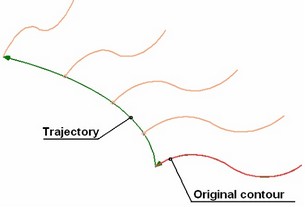
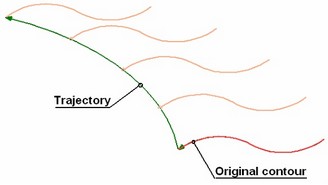
The approach to solid body creation by using an additional guide or guides serves certain specific goals, such as closing a gap between two curves by a surface obtained by sweeping a specified contour. Creating this kind of bodies assumes that the original contour will rest at one of its ends on the start point of the trajectory path, and at the other end - on the start point of the additional guide. In theory, some kind of a result can be obtained by using various orientations of the original contour, however, the result will be rather hard to predict.
If, for example, the original wire contour rests at its ends on the start points of the trajectory and an additional guide, the resulting surface connecting the trajectory and the additional guide will follow the shape of the original contour.

Faces can be used instead of the first and second additional guides. Orientation of the intermediate sections will be defined by auxiliary vectors calculated as perpendiculars to surfaces at points nearest to trajectory points. In practice surfaces adjacent to trajectory are mostly used. The use of surfaces for defining contour twist is applicable when the first two methods of contour orientation ("Perpendicular to the trajectory" and "Parallel to the original profile") cannot be employed. The following example demonstrates sweep operation when the contour-segment is oriented perpendicular to the auxiliary surface in every point of the trajectory.
Methods for calculating auxiliary vectors by guides
Auxiliary vectors are used by the system for orienting coordinate axes of an intermediate section (rotating the section) or for calculating the scale factor for an intermediate section. When using an additional guide, the auxiliary vector calculation is done as follows. The auxiliary vector of each intermediate section starts on the trajectory – at the origin of the coordinate system of the intermediate section. The end point of an auxiliary vector, that defines its direction, is located on the additional guide. Calculation of such end point for defining auxiliary vector can be done by one of the four methods.
By minimum distance. The end point of the vector will be the point on the guide nearest to the vector start on the trajectory. |
|
Perpendicular to the path. A plane is constructed through the start point perpendicular to the trajectory. This plane must intersect the guide. The end point is defined as the intersection of the plane and the guide. If no intersection is found between the plane and the guide for some point on the trajectory, an error in operation regeneration is output. Follows are examples of using options "Perpendicular to the path" and "By minimum distance": |
|
Defining elements |
Operation created by the option "Perpendicular to the path" |
Operation created by the option "By minimum distance" |
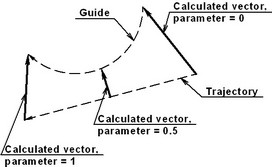
By parameter. Position of any point on a curve can be defined by a parameter – a value defining the point position in percent of the curve length (0 – at the start of the curve, 1 – at the end of the curve). The point on the guide is defined by the same parameter value as the vector start point on the trajectory. This method of calculating an auxiliary vector is least demanding on the orientation and length of the guides. This option is automatically used when orienting sections "By guides". The user can also turn it on manually when defining the scaling or twisting law, for example, in situations, when the additional guide is shorter than the trajectory, or other methods are inadmissible. Here is an example of using the option "By parameter": |
|
Defining elements |
Operation created with option "By parameter" |
By offset. First, the length of the trajectory portion is calculated from the start of the curve to the auxiliary vector start. The vector end is then found by the same length on the guide from the origin. In this method, the length of the additional guide must be greater than or equal to the length of the trajectory. This option can be used when, for example, only a portion of the additional guide shall be used that is equal to the total length of the trajectory. Follows is an example of using the option "By offset": |
|
Defining elements. The contour is swept parallel to the original position. |
Operation created by the option "By offset" |
Steps of operation creation
To create the operation, use the command "3SW: Create Sweep":
Icon |
Ribbon |
|---|---|
|
3D Model → Create → Sweep |
Keyboard |
Textual Menu |
<3SW> |
Operation > Sweep |
The general algorithm of the operation creation is as follows:
1. Select an option of contour orientation.
2. Select a contour.
3. Select elements defining the path.
4. Define correction of the contour original position. (Optional)
5. Defined additional guiding paths or a surface. (Optional)
6. Define operation parameters. (Optional)
7. Confirm operation creation.
Selecting an option of contour orientation.
We recommend defining the contour orientation first, since that will determine the set of options offered by the system in the following steps.
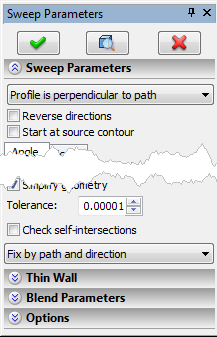
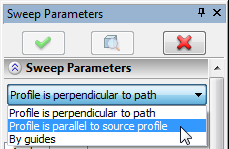
Option selection is done in the property window of the operation, in the provided combo box with a pull-down list. The pull-down list contains all three possible ways of orienting the contour – "Profile is perpendicular to path", "Profile is parallel to source profile", "By guides". The first and, apparently, the most often used setting is the system default. Therefore, if the contour is to be oriented perpendicular to the path, the contour orientation option selection can be skipped.
Selection of the first two options produces an automenu with options for selecting trajectories, defining the correction of the original contour position and selecting twist and scale guides. Selecting the option "By guides" leaves in the automenu the options for defining the correction of the original contour position and selecting first and second guides.
Contour selection
The first option that turns on automatically in the automenu upon entering the command is the contour selection:
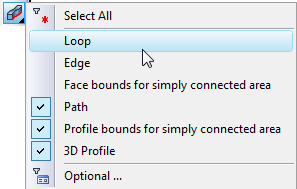
The option contains a set of selector filters helping selection of the desired objects. There is a pull-down list behind the icon that appears after prolonged pressing |
|
Trajectory selection
After defining the contour, the system automatically activates the option for the trajectory path selection.
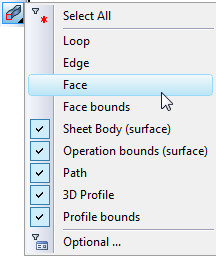
The option also contains a set of selector filters helping selection of the desired objects. In the pull-down list, you can define what objects with wire geometry shall be selectable for defining the trajectory, such as a 3D profile, 3D path, edge, face, surface, etc. The element selected for defining the trajectory is highlighted in green (by default). |
|
Once a trajectory is selected, the operation confirmation icon ![]() becomes accessible. The specified data is already enough to create the operation. The selected contour will be swept from its current position along the trajectory "Perpendicular to the path" or "parallel to the source contour".
becomes accessible. The specified data is already enough to create the operation. The selected contour will be swept from its current position along the trajectory "Perpendicular to the path" or "parallel to the source contour".
Defining correction of the contour original position
Once the trajectory is selected, the system offers to define correction of the contour original position. If this step is not necessary, you can proceed to further steps by manually selecting the respective automenu options.
The system will first offer selecting the first point of the contour attachment:
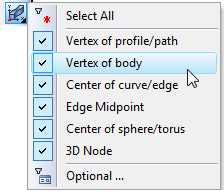
Various suitable objects can be used for defining the point. The option contains a pull-down list for tuning the system for selecting objects of the desired type. Once the point is selected, the new image of the contour snaps to the start of the trajectory. The image is oriented according to the selected contour orientation option and is snapped to the start of the trajectory at the selected point. |
|
After selecting the first point, proceed to further steps. By default, the system offers more correction options, activating those for defining the second and third points:
![]() <S> Select second 3D Node for locating Profile
<S> Select second 3D Node for locating Profile
![]() <O> Select 3D Node for locating Profile
<O> Select 3D Node for locating Profile
After selecting the second point, nothing is updated on the screen. The system waits for the third point selection. After selecting the third point, the image of the corrected contour will be rotated to snap to the third point according to the rules described in "Operation main capabilities".
Specifying Fixing Direction and Contour Orientation Fixing Method
Specifying fixing direction is not a necessary operation and can be omitted.
Fixing direction can be specified only if the contour twist was not defined (in a table form or with the help of guides).
To specify the vector fixing the direction, the following automenu options are used:
![]() <L> Select direction
<L> Select direction
![]() <1> Select First Point of Direction
<1> Select First Point of Direction
![]() <2> Select Second Point of Direction
<2> Select Second Point of Direction
The option ![]() allows the user to define the vector fixing the direction by specifying one 3D element (edge, straight path, etc). Options
allows the user to define the vector fixing the direction by specifying one 3D element (edge, straight path, etc). Options ![]() and
and ![]() are used for specifying the direction vector with help of two 3D points.
are used for specifying the direction vector with help of two 3D points.
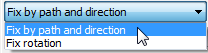
The choice of fixing (fixing by path and direction, fixing of rotation) is selected from the drop-down list in the dialog of the properties window. |
|
Defining contour twist
Contour twist can be defined by a table or by using auxiliary geometry. Let's review all approaches.
Twist definition by table
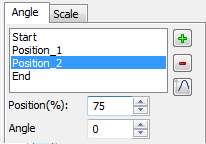
Twist is defined with the help of the controls on the tab "Angle" of the property window.
To enter new contour twist parameters, press the button ![]() . The first time you push it, two special entries are created, "Start" and "End". Subsequent pushes add new intermediate points along the trajectory. Numerical data for each defining point is entered in the property window. Each point position is defined in percent of the trajectory length. The section rotation angle is entered in the "Angle" box, in degrees. To delete a defining point, select it, and then press the button
. The first time you push it, two special entries are created, "Start" and "End". Subsequent pushes add new intermediate points along the trajectory. Numerical data for each defining point is entered in the property window. Each point position is defined in percent of the trajectory length. The section rotation angle is entered in the "Angle" box, in degrees. To delete a defining point, select it, and then press the button ![]() .
.
Position of the intermediate points may be specified with the help of a graph. Use ![]() button in the properties dialog for this purpose. This button will open the graph editing window. The range of definition by X is 0-100 corresponding to the percentage from the length. The value area is not limited. See more details on operations with graphs in chapter "Graphs".
button in the properties dialog for this purpose. This button will open the graph editing window. The range of definition by X is 0-100 corresponding to the percentage from the length. The value area is not limited. See more details on operations with graphs in chapter "Graphs".
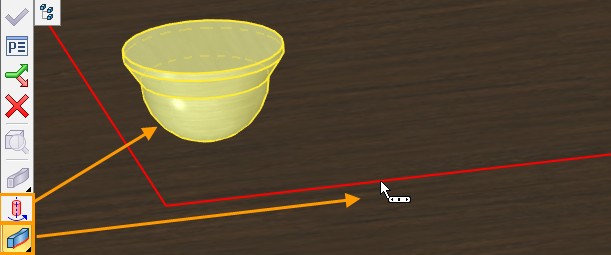
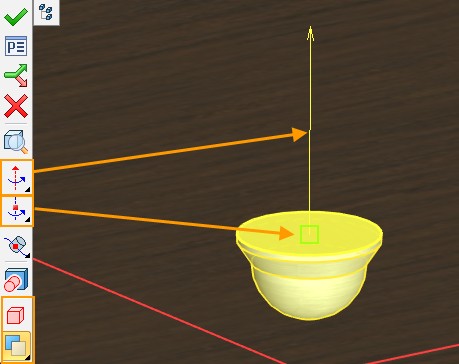
To facilitate definition of twist parameters, auxiliary elements are displayed in the scene – draggers and decorations.
A decoration is an image of an intermediate section for each defining point, together with an arrow specifying the direction and the rotation angle. Arrows are positioned along a spiral, showing the full rotation angle. This is convenient when the rotation angle exceeds 360 degrees. Decorations of an inactive point are drawn in the yellow color, while the decorations of the point being currently manipulated – in the red.
The dragger is a pair of blue segments indicating the zero angle and the current angle. There are two handles at the ends of one dragger segment. Dragging those by the mouse with the depressed bottom ![]() modifies the value of the rotation angle and the point position on the path. As the pointer approaches a dragger handle, it assumes a specific shape.
modifies the value of the rotation angle and the point position on the path. As the pointer approaches a dragger handle, it assumes a specific shape.
Use of auxiliary geometry for defining twist
A twist-defining guide can be selected by the option:
![]() <W> Select guide for defining twist law
<W> Select guide for defining twist law
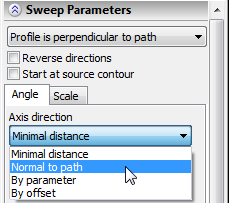
Any object with wire geometry can be used as a guide. After selecting a guide, the dialog in the properties window is automatically switched to the display of the pull-down list from which the method of calculation of rotation vector can be selected. You can choose from four options: “Minimal distance”, “Normal to path”, “By parameter”, “By offset”.
You can select a twist-defining surface by the option:
![]() <N> Select surface for twist law
<N> Select surface for twist law
The surface can be defined by a face, a sheet 3D profile or a surface operation. When using auxiliary geometry, draggers and decorations are not available.
Defining contour scaling
Contour scaling can be defined by a table or by using auxiliary geometry. Let's review all approaches.
Scale definition by table
Scaling is defined with the help of the controls on the tab "Scale" of the property window.
The way of defining parameters is the same as that of defining the twist by table.
The scale law as well as the twist law can be defined with a graph. Use ![]() button in the properties dialog for this purpose. The range of definition by X is 0-100 corresponding to the percentage from the length. The function values must be positive only. See more details on operations with graphs in chapter "Graphs".
button in the properties dialog for this purpose. The range of definition by X is 0-100 corresponding to the percentage from the length. The function values must be positive only. See more details on operations with graphs in chapter "Graphs".
Additionally, the property window has a pulldown list for adjusting parameters of scaling with respect to the attachment point.
When defining the scaling law by table, draggers and decorations are also displayed in the scene.
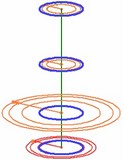
A decoration is an image of an intermediate section for each defining point. Decorations of an inactive point are drawn in the yellow color, while the decorations of the point being currently manipulated – in the red. Additionally, two circles are drawn – a blue one, and a red or yellow one (depending on whether the given point is active). The circles help quickly evaluate the amount of scaling. The size of the blue circle is maintained constant, while the other circle changes according to the scale factor. A provided dragger is a red or yellow arrow along the radius of the second circle. Two handles at the ends of the arrow allow changing the position of the point and the value of the scale factor.
Selection of scaling guide and reference point
A scale-defining guide can be selected by the option:
![]() <A> Select guide for defining scale law
<A> Select guide for defining scale law
Any object with wire geometry can be used as a guide. The system can be tuned for selecting a certain type of objects by using the pulldown list behind the option. The selected object will be highlighted in green (by default). Once the guide is selected, a combo box in the property window becomes available for selecting a scale vector defining option.
The scaling reference point can be defined by the option:
![]() <V> Select scale point
<V> Select scale point
You can select any objects suitable for defining a 3D point.
Once the reference point is selected, a combo box becomes accessible in the property window for selecting an option of scaling with respect to the point. You can choose from the three items – "Maintain size", "Maintain distance", "Change size and distance".
Sweep definition by guides
The difference of the "By guides" approach from "Perpendicular to path" and "Parallel to source contour" is that you select a single guide for defining both twisting and scaling. In this way, you can't select the method of vector calculation or the scaling point. Instead, you define the correction of the original profile orientation by one or three points. The correction makes the system work in the same way as under the option "Perpendicular to path".
The first guide is selected by the option activated automatically upon choosing "By guides" type:
![]() <W> Select guide for defining scale and twist
<W> Select guide for defining scale and twist
Any object with wire geometry can be selected. However, the guide must be smooth for successful operation creation. The selected object is highlighted in green (by default).
The guide surface that defines the twist law can be selected with option:
![]() <Ctrl+W> Select guide surface for defining twist
<Ctrl+W> Select guide surface for defining twist
The surface can be defined by a face, a sheet 3D profile or a surface operation. When using auxiliary geometry, draggers and decorations are not available.
If additional refinement of the intermediate section orientation is necessary, you can select a second guide, using the option:
![]() <A> Select guide for defining orientation
<A> Select guide for defining orientation
Contour orientation by means of the guide surface can be defined with option:
![]() <Ctrl+A> Select guide surface for defining orientation
<Ctrl+A> Select guide surface for defining orientation
Additional operation capabilities
Reverse directions. When turning on this flag the direction of the trajectory is changed to reverse. Start at source contour. This setting is provided for the cases of using a closed trajectory without a well-defined start point. When the flag is turned on, as a start point (the point from which the body will be constructed along the trajectory), the point of the trajectory closest to the contour is automatically selected. Simplify geometry. This setting forces creation of analytical surfaces (planes, cylinders, spheres and tori) wherever possible. If the flag is cleared, exact spline surfaces are constructed. Tolerance. This parameter sets the tolerance for the surface being created – deviation of the resulting surface from the exact solution. The units are meters. Check Self-intersections. This parameter allows the user to correct certain cases of self-intersections occurring upon operation creation. |
|
"Sweep" operation belongs to the family of kinematic operations. Therefore, when defining this operation, one can use several additional features supported by majority of kinematic operations:
● Thin element creation instead of a solid.
● Thickening walls of a body being created by the specified amount.
● Blending of the side edges at the start or the end face.
More details on those capabilities can be found in the chapter "Extrusion".
Using the created sweep in a Boolean
To create a Boolean operation, do the following:
1. Turn on the Boolean creation mode by the automenu option
![]() <Ctrl+B> Select original body for Boolean operation
<Ctrl+B> Select original body for Boolean operation
A Boolean is created when the icon is pushed.
2. Select the type of the operation from the pull-down list under the above option:
![]() <Ctrl+'+'> Addition
<Ctrl+'+'> Addition
![]() <Ctrl+'-'> Subtraction
<Ctrl+'-'> Subtraction
![]() <Ctrl+'*'> Intersection
<Ctrl+'*'> Intersection
![]() <Ctrl+l> Smart mode
<Ctrl+l> Smart mode
Operating principles of the Smart mode:
●If the body being created and the existed selected body have intersection of volumes - the type of Boolean operations: subtraction.
●If the body being created lies entirely within the selected body - the type of Boolean operations: subtraction.
●If the body being created touches and selected body touch each other - the type of Boolean operations: addition.
●If conditions set out above are not met, or a selected body lies inside the created, or error occurred determining the type of penetration, then, Boolean type is not defined - the Boolean operation will not be created.
3. Select the target body for the Boolean (optional in some cases), using the automenu option
![]() <Ctrl+T> Select Target Body for Boolean
<Ctrl+T> Select Target Body for Boolean
If only one body exists in the scene, it is selected automatically. The new body created by the extrusion operation becomes the tool body of the Boolean.
Upon confirming operation creation, first the body is created by the sweep operation, and then the specified type Boolean is performed.
Create Operation Using Forming Body
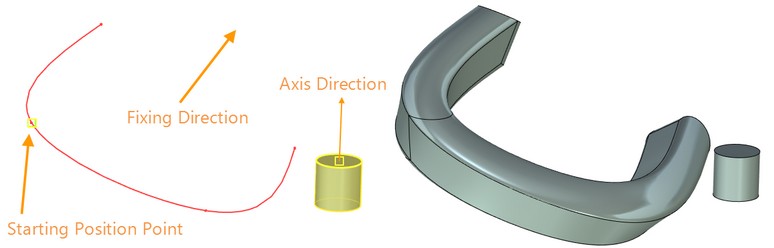
There is a possibility to use solid body as the source object, which is moving along selected trajectory in the Sweep operation. The body spins around the predetermined axis during movement. The resulting “trace” model left by the swept body can be used in further, for example, in Boolean operation.
Thus, it is possible to simulate trace that leaves a milling cutter when machining.
The general algorithm of the operation creation is as follows:
●Select forming body ![]() ,
,
●Select trajectory ![]() ,
,
●Select axis direction of forming body ![]() ,
,
●Select fixing point of axis ![]() ,
,
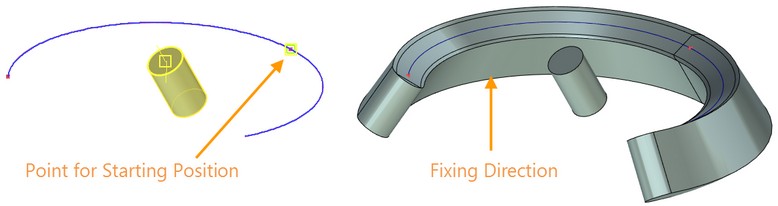
●Select fixing direction ![]() , point for starting position
, point for starting position ![]() and used faces of the body
and used faces of the body ![]() (optional).
(optional).
Operation Options
Use the following option to select a forming body:
|
<M> |
Select forming body |
You may select only solid body as a forming body. You can’t select a sheet metal body or a faceted model.
It does not matter where the forming body is located with respect to the trajectory.
The operation will not be created if overall sizes of the forming body are too large in compare with the trajectory. It can lead to self-intersections and inability of the operation creation.
After the body selection, you need to select a trajectory, along which the body will move, using option:
|
<T> |
Select trajectory |
You can select a planar path or 3D path as a trajectory.
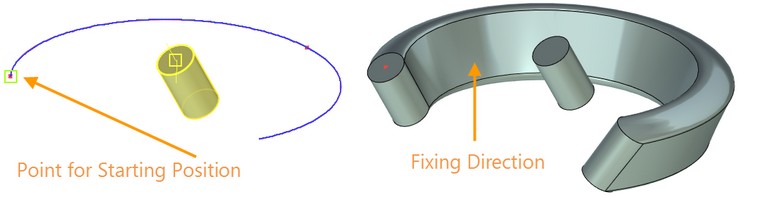
The trajectory may be closed. You should specify a starting position point on closed vertex to create the operation.
The trajectory should lie in a plane orthogonal to the forming body axis, unless a fixing direction controlling the orientation of the forming body is supplied.
The body will spin while moving along the trajectory. So that you need to select an axis direction using option:
|
<A> |
Select axis direction of forming body |
You should specify an axis fixing point, after selection of the axis.
|
<S> |
Select fixing point of axis |
The fixing point will determine axis location according to the trajectory. The fixing point lies on the trajectory when the body moves along it.
Fixing direction controls the orientation of the forming body according to the trajectory.
Use the following option to select a fixing direction of the forming body:
|
<L> |
Select fixing direction |
You can also define fixing direction by two points using options:
|
<1> |
Select 1-st point of fixing direction |
|
<2> |
Select 2-nd point of fixing direction |
The fixing direction should not have to be in the same direction as the forming body rotation axis.
If the fixing direction is not the same as the direction of forming body axis, you should additionally specify a starting position point.
A 3D trajectory should match the following requirement: all curves of the trajectory should be analytic curves, a C2 non-rational b-curves or a helical curves created by a Parasolid function.
Fixing direction should not coincide at any point with the tangent to the trajectory.
More information about fixing direction can be found in the “Operation main capabilities” section.
То specify a point for starting position of the forming body use option:
|
<V> |
Select point for starting position |
Location of the point on the trajectory affects the overall shape of the resulting body.
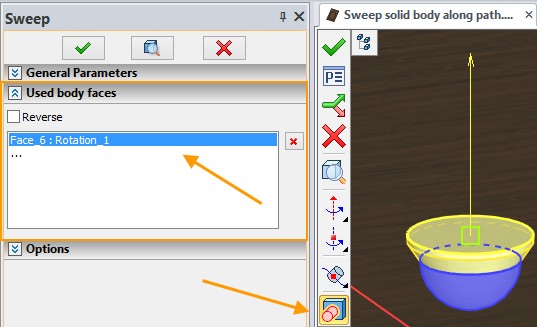
You can select body faces of the forming body using option ![]() Select used body faces for simplification.
Select used body faces for simplification.
|
<F> |
Select used body faces for simplification |
Only selected faces will be used for the operation. If Reverse flag is set, the selected faces will not be used for the operation.
The resulting body can be used for Boolean operation.
More information about Boolean operations can be found in "Boolean operation" chapter.
If the forming body should be at some distance from the trajectory, you should disable the Align fixing point of the body rotation with trajectory starting point flag.
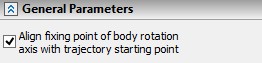
In this case, after you set all the basic parameters of the operation, it is necessary to choose a fixing direction and a point for starting position.
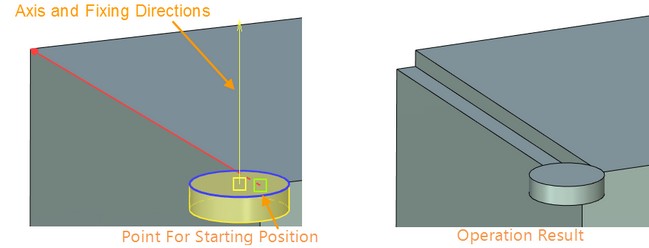
If the forming body does not lie on the trajectory, the trajectory should be G1 continious.
For example, the fixing direction may match the direction of the axis of the forming body rotation and the point for starting position may be chosen at the beginning of the trajectory.
Example of Operation Creation using Solid Body
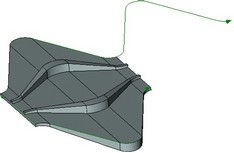
For example, you can model a groove on the door using the operation. For this purpose a trajectory on the treated body and forming body of the desired shape were created:
Trajectory on the treated body: |
|
Forming body: |
|
After command activation, you need to select a forming body and a trajectory:
For the forming body you need to define axis of rotation ![]() and fixing point of rotation axis
and fixing point of rotation axis ![]() .
.
When the forming body is moved along the predetermined trajectory, it simultaneously rotates around the defined axis, thereby forming the groove. The Boolean operation of Subtraction is applied after that. The result is the following: |
|
The example can be found in: "Examples \Release 15 new features\Sweep solid body along path" file "Sweep solid body along path.grb".