Sweeping Body by Trajectory |
  
|
Sweeping Body by Trajectory |
|
There is a possibility to use solid body as the source object, which is moving along selected trajectory in the Sweep operation.
To do this, you need activate the option:
|
Solid |
The body spins around the predetermined axis during movement. The resulting “trace” model left by the swept body can be used in further, for example, in Boolean operation.
Thus, it is possible to simulate trace that leaves a milling cutter when machining.
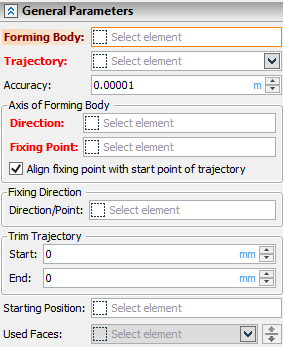
The general algorithm of the operation creation is as follows:
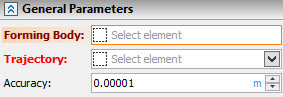
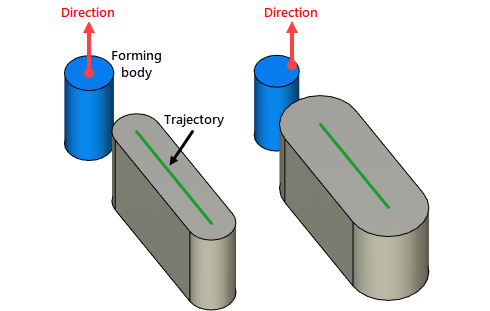
•Select forming body
•Select trajectory
•Select axis direction of forming body
•Select fixing point of axis
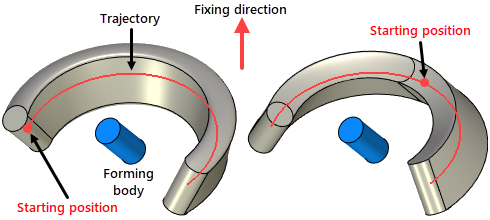
•Select fixing direction, point for starting position and used faces of the body (optional).
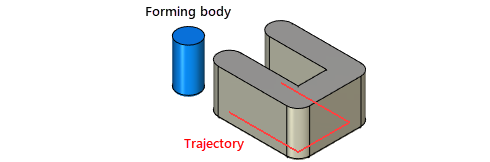
Forming body
You may select only solid body as a forming body. You can’t select a sheet metal body or a faceted model.
It does not matter where the forming body is located with respect to the trajectory.
The operation will not be created if overall sizes of the forming body are too large in compare with the trajectory. It can lead to self-intersections and inability of the operation creation.
After the body selection, you need to select a trajectory, along which the body will move.
Trajectory
You can select a planar path or 3D path as a trajectory.
The trajectory may be closed. You should specify a starting position point on closed vertex to create the operation.
The trajectory should lie in a plane orthogonal to the forming body axis, unless a fixing direction controlling the orientation of the forming body is supplied.
![]()
Accuracy sets the tolerance to the created surface - the deviation of the resulting surface from the exact solution. Measured in meters.
Axis of forming body
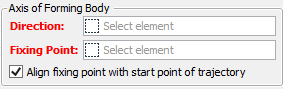
The body will spin while moving along the trajectory. So that you need to select an axis direction.
You should specify an axis fixing point, after selection of the axis.
Fixing point
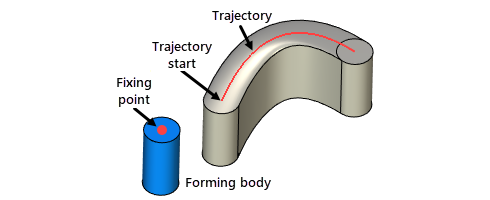
The fixing point will determine axis location according to the trajectory. The fixing point lies on the trajectory when the body moves along it. If the forming body should be at some distance from the trajectory, you should disable the Align fixing point of the body rotation with trajectory starting point flag.
Fixing direction
![]()
Fixing direction controls the orientation of the forming body according to the trajectory.
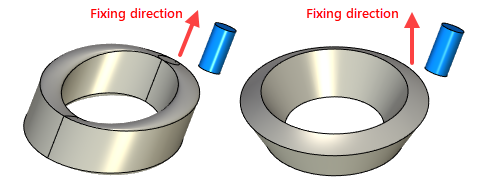
You can also define fixing direction by two points.
The fixing direction should not have to be in the same direction as the forming body rotation axis.
If the fixing direction is not the same as the direction of forming body axis, you should additionally specify a starting position point.
A 3D trajectory should match the following requirement: all curves of the trajectory should be analytic curves, a C2 non-rational b-curves or a helical curves created by a Parasolid function.
Fixing direction should not coincide at any point with the tangent to the trajectory.
Used faces
Тo specify a point for starting position of the forming body use option Used face. Location of the point on the trajectory affects the overall shape of the resulting body.
Only selected faces will be used for the operation. If Reverse flag ![]() is set, the selected faces will not be used for the operation.
is set, the selected faces will not be used for the operation.
The resulting body can be used for Boolean operation.
More information about Boolean operations can be found in Boolean operation chapter.