Intersection Check |
  
|
Intersection Check |
|
Calling the command:
Icon |
Ribbon |
|---|---|
|
Measure > Geometry Analysis > Intersection Check Assembly (3D) > Additional > Intersection Check Analysis > Additional > Intersection Check Routing > Additional > Intersection Check |
Keyboard |
Textual Menu |
<QI> |
Tools > Geometry Analysis > Intersection Check |
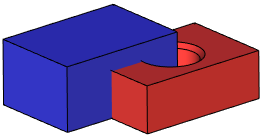
This command allows checking the model for intersections and contacts of the selected bodies. The command is particularly helpful when working with assemblies.
The command offers two checking modes: checking intersections of all bodies in the scene, and checking intersection of the selected bodies. The desired mode is selected in the parameters window.
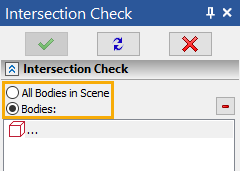
After entering the command, the Bodies parameter is set in the parameters window, which allows you to directly specify the bodies whose intersection with each other needs to be checked. This is necessary if there are many bodies in the scene and they have complex geometry, so that checking for the intersection of all bodies in the scene does not take a long time.
After selecting a specific body, it will be added to the verification list, and the results of the verification will be automatically displayed in the Intersections Found field.
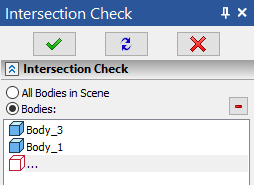
To delete a specific body from the check list, use the ![]() button.
button.
To disable automatic intersection checking, you need to use the automenu option:
|
<U> |
Automatic data update |
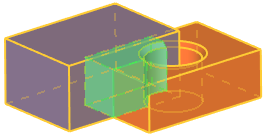
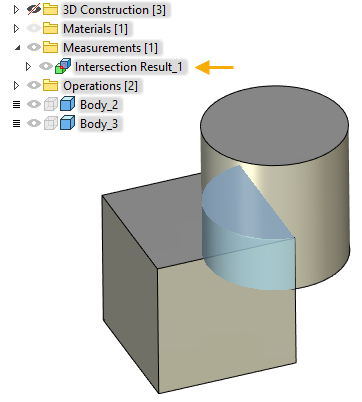
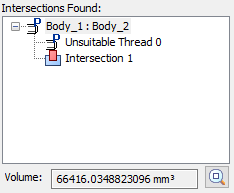
If you click an intersection report, the intersecting bodies will become semitransparent in the 3D window and change the color, while the intersection region will be brightly highlighted. The volume of the bodies' intersecting region will be displayed in the Volume pane.
If the intersecting region is too small, you can use the button Zoom in ![]() , and the image of the intersection region will be magnified.
, and the image of the intersection region will be magnified.
If you need to save the result of measuring the intersection of bodies as a separate element of the model, you need to use the automenu option:
|
<R> |
Create Result |
Depending on the specified additional parameters, the analysis results will be displayed differently in the Intersections Found filed.
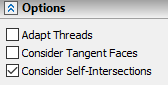
The command provides two additional parameters, Adapt Threads, Consider Tangent Faces and Consider Self-Intersections.
Often, one part is connected with another one by a thread. In this case, with the Adapt Threads parameter set, the system will be taking into the account thread parameters of the intersecting operations and, in the case of finding a mismatch in some thread parameters (for example, the pitch), the message Unsuitable Thread 0 will be displayed in the Intersections Found filed. If you click this message, the respective faces with the thread will be marked in the 3D window by dashed lines.
By default, the system accounts only for intersections of the bodies penetrating each other. If the Consider Tangent Faces option is set, the system will be also accounting for touching contacts, besides intersections of operations. Therefore, the touching faces of the operations will be mentioned in the Intersections Found field, besides intersections and mismatching thread parameters.
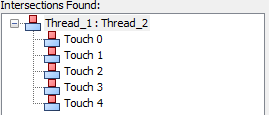
If you click a report about a touch, the respective faces will be marked by dotted lines in the 3D window.
Using the Consider Self-Intersections option, the system allows you to exclude self–intersections from the analysis of intersections - for example, when a 3D fragment has more than one body intersecting with each other. This option is enabled by default.