Mate Transfromations |
  
|
Mate Transfromations |
|
As a result of applying mates, bodies may change their positions within 3D scene. Such changes in body's position are called Mate Transformations.
Mate transformation may be kept or non-kept, which characterize the perception of transformations by the system.
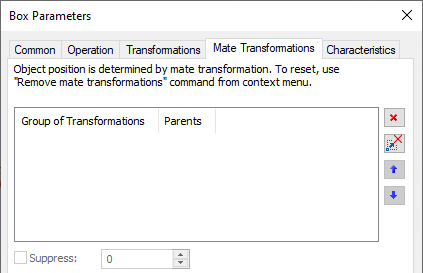
All mate transformations are non-kept by default. If some non-kept mate transformations are applied to a body, then the notice is displayed at the top of the Mate Transformations tab in the parameters dialog of the body and its forming operation. The notice states that object position is determined by mate transformation. Non-kept mate transformations are not listed below.
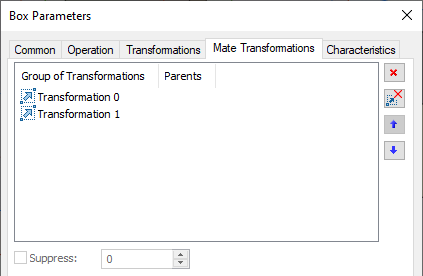
If non-kept mate transformations are applied to a body, then the contextual menu of the body and its forming operation contains the Keep Mate transformations command. Calling this command converts all non-kept mate transformations of the body into kept ones. Kept mate transformations are listed at the Mate Transformations tab in the parameters dialog of the body and its forming operation. When keeping mate transformations, all non-kept ones are converted into a single group, regardless of the number of their parent mates. If you apply mates to a body, which already has kept mate transformations, and then call the Keep Mate transformations command again, the transformations of the new mate will be kept as a new group. Elementary transformations forming a group cannot be viewed.
Buttons for managing the list of transformation groups are located to the right of it:
![]() Delete transformation group (deletes currently selected group);
Delete transformation group (deletes currently selected group);
![]() Delete all groups of transformations;
Delete all groups of transformations;
All kept mate transformations of a body may also be deleted using the Remove Mate Transformations command, which is available in the contextual menu of the body and its forming operation.
If the parent mate still exists in the model, then deletion of its resulting transformations essentially just cancels their keeping, without affecting the actual position of the body.
If the parent mate was deleted, then deletion of its resulting transformations restores the position, which the body had before applying the mate.
![]() Up (moves currently selected group one row up in the list);
Up (moves currently selected group one row up in the list);
![]() Down (moves currently selected group one row down in the list);
Down (moves currently selected group one row down in the list);
The order of groups in the list defines the order of applying transformations to body.
The Suppress checkbox and its corresponding input field are located below the list of transformation groups. This checkbox is applied individually to a transformation group which is currently selected in the list. Enabling the checkbox excludes a selected group from the calculation of a 3D element's position and sets the "1" value in the corresponding input field. Disabling the checkbox includes a selected group into the calculation of a 3D element's position and sets the "0" value in the input field. You can input said values manually using the keyboard or define them by a custom variable. Latter allows you to control the suppression via Parametrization. A transformation will not be suppressed if a value of a variable is not equal to zero. Any positive values are replaced by "1", any negative values are replaced by zero.
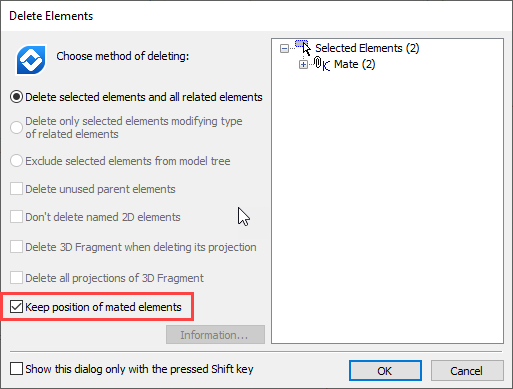
In addition to manual keeping of mate transformations, they are kept automatically when deleting mates, if the Keep position of mated elements checkbox is enabled in the Delete Elements dialog. If mate transformations were kept manually, then the position of mated bodies does not change upon deletion of mates, regardless of the status of this checkbox.
Mate transformations in the Transformations command
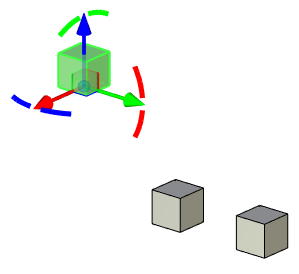
Upon applying the ![]() Transformations command to a body, body's position during execution of the command is displayed without considering non-kept mate transformations. At the same time, kept mate transformations define position of the body in relation to the transformations' LCS manipulator.
Transformations command to a body, body's position during execution of the command is displayed without considering non-kept mate transformations. At the same time, kept mate transformations define position of the body in relation to the transformations' LCS manipulator.
Example:
|
|
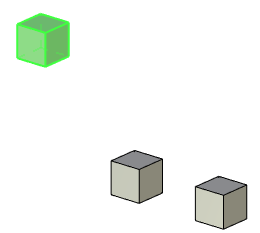
Initial position of body |
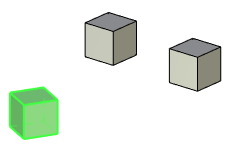
Position of body after applying mates |
|
|
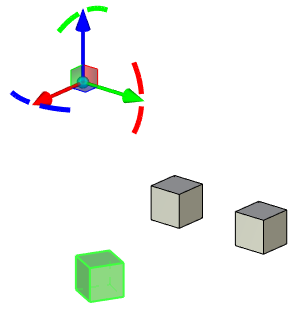
Body display in the Transformations command, |
Body display in the Transformations command, |
See Also: